A Technical Deep Dive into Diffusion Models: Theory, Mathematics, and Implementation (Placeholder)

1. Introduction to Diffusion Models
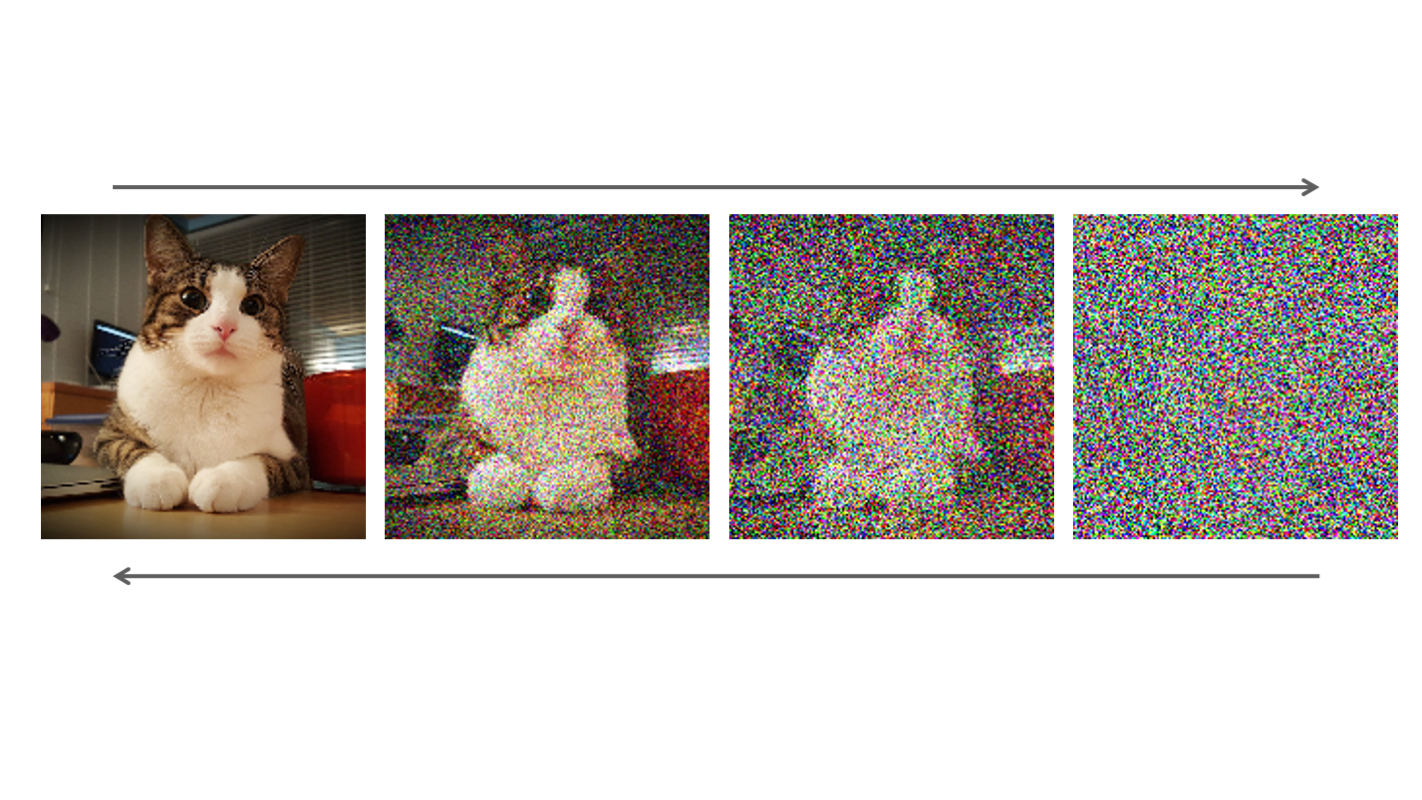
Diffusion models are based on the idea of gradually adding noise to data and then learning to reverse this process. The forward process (noise addition) is fixed, while the reverse process (noise removal) is learned. This approach allows for high-quality sample generation and offers unique advantages over other generative models like GANs and VAEs.
2. Mathematical Foundations
2.1 Forward Process
The forward process is defined as a Markov chain that gradually adds Gaussian noise to the data. Let be our initial data point, and be the subsequent noisy versions. The forward process is defined as:
where is a variance schedule that controls the amount of noise added at each step.
We can derive a useful property that allows us to sample directly given :
where and .
2.2 Reverse Process
The reverse process aims to gradually denoise the data, starting from pure noise and working backwards to recover the original data . We model this process as:
where and are learned functions parameterized by .
2.3 Variational Lower Bound
To train the model, we optimize a variational lower bound on the log-likelihood:
This can be further decomposed into:
where:
3. Training Objective
The primary training objective is to minimize the reverse KL divergence:
where and .
This objective is derived from the fact that the optimal reverse process satisfies:
4. PyTorch Implementation
Let's implement key components of a diffusion model using PyTorch.
4.1 Noise Schedule
First, we'll define the noise schedule:
import torch
import torch.nn as nn
class NoiseSchedule(nn.Module):
def __init__(self, num_timesteps):
super().__init__()
self.num_timesteps = num_timesteps
# Linear schedule from Ho et al. (2020)
beta_start = 1e-4
beta_end = 2e-2
self.betas = torch.linspace(beta_start, beta_end, num_timesteps)
self.alphas = 1 - self.betas
self.alpha_bars = torch.cumprod(self.alphas, dim=0)
def forward(self, t):
return self.betas[t], self.alphas[t], self.alpha_bars[t]4.2 U-Net Architecture
Next, we'll implement a simplified U-Net architecture, which is commonly used as the backbone for diffusion models:
class ResidualBlock(nn.Module):
def __init__(self, in_channels, out_channels):
super().__init__()
self.conv1 = nn.Conv2d(in_channels, out_channels, 3, padding=1)
self.conv2 = nn.Conv2d(out_channels, out_channels, 3, padding=1)
self.bn1 = nn.BatchNorm2d(out_channels)
self.bn2 = nn.BatchNorm2d(out_channels)
self.relu = nn.ReLU()
if in_channels != out_channels:
self.shortcut = nn.Conv2d(in_channels, out_channels, 1)
else:
self.shortcut = nn.Identity()
def forward(self, x):
residual = x
x = self.relu(self.bn1(self.conv1(x)))
x = self.bn2(self.conv2(x))
x += self.shortcut(residual)
x = self.relu(x)
return x
class UNet(nn.Module):
def __init__(self, in_channels, out_channels, time_emb_dim=256):
super().__init__()
# Time embedding
self.time_mlp = nn.Sequential(
nn.Linear(1, time_emb_dim),
nn.ReLU(),
nn.Linear(time_emb_dim, time_emb_dim)
)
# Encoder
self.enc1 = ResidualBlock(in_channels + time_emb_dim, 64)
self.enc2 = ResidualBlock(64, 128)
self.enc3 = ResidualBlock(128, 256)
# Bottleneck
self.bottleneck = ResidualBlock(256, 512)
# Decoder
self.dec3 = ResidualBlock(512 + 256, 256)
self.dec2 = ResidualBlock(256 + 128, 128)
self.dec1 = ResidualBlock(128 + 64, 64)
self.final = nn.Conv2d(64, out_channels, 1)
self.maxpool = nn.MaxPool2d(2)
self.upsample = nn.Upsample(scale_factor=2, mode='bilinear', align_corners=False)
def forward(self, x, t):
# Time embedding
t_emb = self.time_mlp(t.unsqueeze(-1)).unsqueeze(-1).unsqueeze(-1)
t_emb = t_emb.expand(-1, -1, x.shape[2], x.shape[3])
# Encoder
x1 = self.enc1(torch.cat([x, t_emb], dim=1))
x2 = self.enc2(self.maxpool(x1))
x3 = self.enc3(self.maxpool(x2))
# Bottleneck
x = self.bottleneck(self.maxpool(x3))
# Decoder
x = self.upsample(x)
x = self.dec3(torch.cat([x, x3], dim=1))
x = self.upsample(x)
x = self.dec2(torch.cat([x, x2], dim=1))
x = self.upsample(x)
x = self.dec1(torch.cat([x, x1], dim=1))
return self.final(x)4.3 Diffusion Model
Now, let's implement the main diffusion model:
class DiffusionModel(nn.Module):
def __init__(self, unet, noise_schedule):
super().__init__()
self.unet = unet
self.noise_schedule = noise_schedule
def forward(self, x, t):
return self.unet(x, t)
def loss(self, x_0):
batch_size = x_0.shape[0]
t = torch.randint(0, self.noise_schedule.num_timesteps, (batch_size,), device=x_0.device)
noise = torch.randn_like(x_0)
x_t = self.q_sample(x_0, t, noise)
predicted_noise = self(x_t, t)
loss = nn.MSELoss()(noise, predicted_noise)
return loss
def q_sample(self, x_0, t, noise):
_, _, alpha_bar = self.noise_schedule(t)
alpha_bar = alpha_bar.view(-1, 1, 1, 1)
x_t = torch.sqrt(alpha_bar) * x_0 + torch.sqrt(1 - alpha_bar) * noise
return x_t
@torch.no_grad()
def p_sample(self, x_t, t):
beta, alpha, alpha_bar = self.noise_schedule(t)
beta = beta.view(-1, 1, 1, 1)
alpha = alpha.view(-1, 1, 1, 1)
alpha_bar = alpha_bar.view(-1, 1, 1, 1)
predicted_noise = self(x_t, t)
mean = (1 / torch.sqrt(alpha)) * (x_t - (beta / torch.sqrt(1 - alpha_bar)) * predicted_noise)
var = beta
epsilon = torch.randn_like(x_t)
return mean + torch.sqrt(var) * epsilon
@torch.no_grad()
def sample(self, num_samples, img_shape):
device = next(self.parameters()).device
x_T = torch.randn((num_samples, *img_shape), device=device)
for t in reversed(range(self.noise_schedule.num_timesteps)):
t_batch = torch.full((num_samples,), t, device=device, dtype=torch.long)
x_T = self.p_sample(x_T, t_batch)
return x_T5. Training Loop
Here's a basic training loop for our diffusion model:
def train(model, dataloader, optimizer, num_epochs):
for epoch in range(num_epochs):
for batch in dataloader:
optimizer.zero_grad()
loss = model.loss(batch)
loss.backward()
optimizer.step()
print(f"Epoch {epoch + 1}, Loss: {loss.item():.4f}")
# Instantiate the model and optimizer
unet = UNet(in_channels=3, out_channels=3)
noise_schedule = NoiseSchedule(num_timesteps=1000)
model = DiffusionModel(unet, noise_schedule)
optimizer = torch.optim.Adam(model.parameters(), lr=1e-4)
# Train the model
train(model, dataloader, optimizer, num_epochs=100)6. Advanced Topics
6.1 Improved Sampling Techniques
Several techniques have been proposed to improve the sampling process:
-
DDIM (Denoising Diffusion Implicit Models): This technique allows for faster sampling by skipping steps in the reverse process.
-
Classifier guidance: By incorporating a pre-trained classifier, we can guide the generation process towards specific classes or attributes.
-
Adaptive step size: Dynamically adjusting the step size during sampling can lead to faster and higher-quality generation.
6.2 Continuous Time Formulation
Recent work has explored formulating diffusion models in continuous time, leading to more flexible and theoretically grounded models. The stochastic differential equation (SDE) formulation is given by:
where is the drift coefficient, is the diffusion coefficient, and is a Wiener process.
The corresponding reverse-time SDE is:
where is a reverse-time Wiener process.
6.3 Score-Based Generative Models
Score-based generative models provide an alternative perspective on diffusion models. They focus on estimating the score function rather than directly modeling the probability density. This approach leads to a unified framework that encompasses both diffusion models and noise-conditioned score networks.